Frozen Lake Example in RL
It’s been too long to post anything due to pandemic which is ultimately affected my daily routines and academic career. Finally, those days are over, and I have found some time to focus on my interests. So, let’s start coding.
Introduction
If you have interested in Reinforcement Learning (RL), you might have heard the famous grid world example: Frozen Lake. If you are not familiar, you control a character (agent) in a grid world that some cells are walkable and others will fall you into the water. Also on these walkable cells, since the lake is frozen, you may find yourself walking in a different direction you desired. Your goal is to reach the Frisbee without wasting too much time (it’s freezing out there!), and falling into any holes.
The characteristics of this problem:
- The world is deterministic.
- We have a perfect model of the environment. Meaning we know the transition probabilities and rewards we get from each action–state pair.
Implementation
I have used Jupyter Notebook to write code, since it makes analyzing much easier.
Imports
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
import numpy as np
from IPython.display import clear_output, HTML, display
plt.rcParams['figure.figsize'] = 12,8
Environment
I will use my own Environment object to implement the problem. The model I
mentioned will be presented inside this class. Also, after playing, we can
animate the moves that being made to get a clear understanding. If you don’t
want to bore yourself with the problem implementation you can try to use the
OpenAI’s implementation.
class Environment:
COLOR_MAP = {
' ': (1.0, 1.0, 1.0, 0.5),
'S': (0.0, 0.0, 1.0, 0.3),
'A': (0.7, 1.0, 0.0, 1.0),
'B': (1.0, 0.3, 0.0, 0.7),
'*': (0.0, 0.0, 0.0, 1.0),
}
TIME_LIMIT = 100
def __init__(self, rewards=None, maze=None, dizzy=0.20, agent_position=(2, 0)):
if rewards == None:
self.rewards = {
'A' : +1.0,
'B' : -1.0,
' ' : -0.04,
'*' : -0.04
}
else:
self.rewards= rewards
if maze == None:
self.maze = [
[' ', ' ', ' ', 'A'],
[' ', '*', ' ', 'B'],
[' ', ' ', ' ', ' '],
]
else:
self.maze = maze
self.maze_w = len(self.maze[0])
self.maze_h = len(self.maze)
self.dizzy = dizzy # prob. of change in direction
self.time = 0
self.initial_agent_position = agent_position
self.agent_position = agent_position # start state
self.status = 'ongoing'
self.log = []
def reset(self):
self.time = 0
self.agent_position = self.initial_agent_position
self.status = 'ongoing'
self.log = []
The constructor is self-explanatory. Without parameters, it creates the default
frozen lake map. In order to reset, reset() method implemented which called
after the agent has played. The model and interactions has done by the following
methods:
def __findNextState(self, state, action):
y, x = state
if self.maze[y][x] == 'A' or self.maze[y][x] == 'B':
return state
if action == 'left':
if x > 0 and self.maze[y][x-1] != '*':
x -= 1
elif action == 'right':
if x < self.maze_w - 1 and self.maze[y][x+1] != '*':
x += 1
elif action == 'up':
if y > 0 and self.maze[y-1][x] != '*':
y -= 1
elif action == 'down':
if y < self.maze_h - 1 and self.maze[y+1][x] != '*':
y += 1
return (y,x)
def interact(self, action):
if self.status == 'ongoing':
if np.random.rand() < self.dizzy:
if action == 'left':
newAction = 'down' if np.random.rand() < 0.50 else 'up'
elif action == 'right':
newAction = 'up' if np.random.rand() < 0.50 else 'down'
elif action == 'up':
newAction = 'left' if np.random.rand() < 0.50 else 'right'
elif action == 'down':
newAction = 'right' if np.random.rand() < 0.50 else 'left'
self.log.append((action, newAction, self.agent_position))
action = newAction
else:
newAction = action
self.log.append((action, newAction, self.agent_position))
y, x = self.__findNextState(self.agent_position, action)
self.agent_position = y, x # update position
reward = self.rewards[self.maze[y][x]] # calculate r_t
self.status = 'ongoing'
if self.maze[y][x] == 'A' or self.maze[y][x] == 'B':
self.status = 'done'
self.time += 1 # increase time
if self.time == self.TIME_LIMIT:
self.status = 'done'
return reward
def info(self, state, action):
y, x = state
directions = {
'left': ['left', 'up', 'down'],
'right': ['right', 'up', 'down'],
'up': ['up', 'left', 'right'],
'down': ['down', 'left', 'right']
}
probs = [1-self.dizzy, self.dizzy/2, self.dizzy/2]
results = []
for direction in directions[action]:
s = self.__findNextState(state, direction)
r = self.rewards[self.maze[s[0]][s[1]]]
d = self.maze[s[0]][s[1]] != ' '# or self.maze[s[0]][s[1]] == 'B' or self.maze
p = probs[len(results)]
results.append([p, s, r, d])
return results
Finally, the animate() method. I have kept a log to keep the moves:
def animate(self, delay=1):
def __animate(time):
def __calculate_arrow(d):
if d == 'right':
dx = 0.4
dy = 0
elif d == 'left':
dx = -0.4
dy = 0
elif d == 'up':
dx = 0
dy = -0.4
elif d == 'down':
dx = 0
dy = +0.4
return dx, dy
plt.clf()
plt.xticks(np.arange(-0.5, self.maze_w, 1), labels=[])
plt.yticks(np.arange(-0.5, self.maze_h, 1), labels=[])
plt.grid()
plt.title("$t={}$".format(time))
if time == self.time:
y, x = self.agent_position
self.maze[y][x] = 'S'
_ = plt.imshow([[self.COLOR_MAP[i] for i in j] for j in self.maze])
self.maze[y][x] = ' '
return _,
desired_action, given_action, position = self.log[time]
y, x = position
self.maze[y][x] = 'S'
plt.imshow([[self.COLOR_MAP[i] for i in j] for j in self.maze])
self.maze[y][x] = ' '
dx, dy = __calculate_arrow(desired_action)
plt.arrow(x, y, dx, dy, head_width=0.1, head_length=0.1, color='b')
dx, dy = __calculate_arrow(given_action)
_ = plt.arrow(x, y, dx, dy, head_width=0.1, head_length=0.1, color='y')
return _,
anim = FuncAnimation(plt.figure(), __animate, frames=self.time+1, interval = delay * 1000)
display(HTML(anim.to_html5_video()))
plt.close()
Agent
I have used policy iteration method to solve the problem. Actually, in this type of problem it does unnecessary computation. Because we can find the optimal actions while calculating the state values. Nevertheless, here is the implementation:
class Agent:
ACTIONS = ['left', 'up', 'right', 'down']
def __init__(self, environment=None, gamma=0.03):
self.env = environment if environment != None else Environment()
self.policy = None
self.V = None
self.score = 0.0
self.gamma = gamma
Below code fragment implements the policy iteration. The user calls the
train() method and waits till convergence.
def _policyEval(self):
while True:
old_V = self.V.copy()
for state in range(self.env.maze_h * self.env.maze_w):
state = np.unravel_index(state, self.V.shape)
a = self.policy[state] # pick an action according to policy
sigma = sum(p * self.V[ns] if not t else 0.0 for p, ns, r, t in self.env.info(state, self.ACTIONS[a]))
reward = sum(p * r for p, ns, r, t in self.env.info(state, self.ACTIONS[a]))
self.V[state] = (reward + self.gamma * sigma)
if np.allclose(old_V, self.V):
break
def _policyImprove(self):
for state in range(self.env.maze_h * self.env.maze_w):
state = np.unravel_index(state, self.V.shape)
action_values = np.zeros(len(self.ACTIONS))
for a in range(len(self.ACTIONS)):
action_values[a] = sum(p * self.V[ns] for p, ns, r, t in self.env.info(state, self.ACTIONS[a]))
best_action = np.argmax(action_values)
self.policy[state] = best_action
def train(self):
print("Training has begun...")
self.policy = np.zeros( (self.env.maze_h, self.env.maze_w) , dtype=int)
self.V = np.zeros( (self.env.maze_h, self.env.maze_w) )
self.V[0,3] = 1
self.V[1,3] = -1
while True:
old_policy = self.policy.copy()
self._policyEval()
self._policyImprove()
if np.allclose(old_policy, self.policy):
break
print("Training finished.")
After training has done, you can either display the state values or play the actual game. The methods accomplish these are implemented as below:
def display(self):
plt.subplot(1,2,1)
plt.xticks(np.arange(-0.5, self.env.maze_w, 1), labels=[])
plt.yticks(np.arange(-0.5, self.env.maze_h, 1), labels=[])
plt.grid()
plt.title("State Values")
y, x = self.env.agent_position
self.env.maze[y][x] = 'S'
_ = plt.imshow([[self.env.COLOR_MAP[i] for i in j] for j in self.env.maze])
self.env.maze[y][x] = ' '
for index, data in enumerate(self.V.flatten()):
index = np.unravel_index(index, self.V.shape)
plt.text(x=index[1], y=index[0], s="{:.2f}".format(data))
plt.subplot(1,2,2)
plt.xticks(np.arange(-0.5, self.env.maze_w, 1), labels=[])
plt.yticks(np.arange(-0.5, self.env.maze_h, 1), labels=[])
plt.grid()
plt.title("Optimal Actions")
y, x = self.env.agent_position
self.env.maze[y][x] = 'S'
plt.imshow([[self.env.COLOR_MAP[i] for i in j] for j in self.env.maze])
self.env.maze[y][x] = ' '
for state_id in range(self.env.maze_h * self.env.maze_w):
y, x = np.unravel_index(state_id, self.V.shape)
action = self.ACTIONS[self.policy[y,x]]
if action == 'left':
dx = -0.3
dy = +0.0
if action == 'right':
dx = +0.3
dy = +0.0
if action == 'up':
dx = +0.0
dy = -0.3
if action == 'down':
dx = +0.0
dy = +0.3
plt.arrow(x, y, dx, dy, head_width=0.1, head_length=0.1, color='k')
plt.show()
def play(self):
if self.policy is None:
print('No policy trained!')
return
self.score = 0.0
while self.env.status == 'ongoing':
selected_action = self.ACTIONS[self.policy[self.env.agent_position]]
self.score += self.env.interact(selected_action)
print("Score: {:.2f}".format(self.score))
self.env.animate()
self.env.reset()
Yep, that’s it. :)
Result
We can run the bellow code piece:
agent = Agent(gamma=0.999)
agent.train()
agent.display()
The output of the program will be:
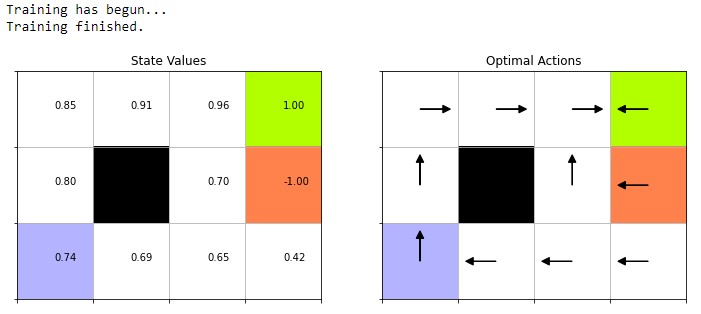
If you call agent.play() you can watch the playthrough. The blue arrow means
the desired action for the next state and the green arrow is the resulted
action. In my case it got 0.76 points.
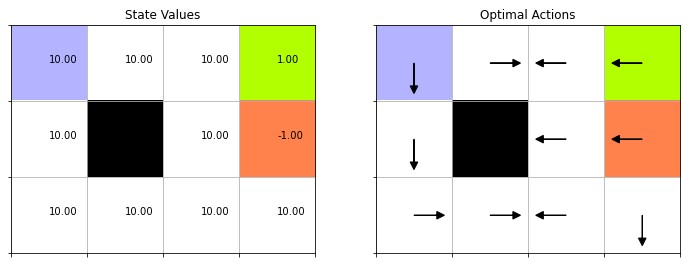
I have uploaded the notebook on my GitHub. I encoruge you to download and tweak some parameters. For example; if we gave a positive reward instead of a penalty for standing on blank tiles, then in the optimal policy you would see it would select actions that will keep the game running. Meaning it won’t go near to the green and red tiles which eventually ends the game: